C++ タクトスイッチでサーボモータをコントロールする
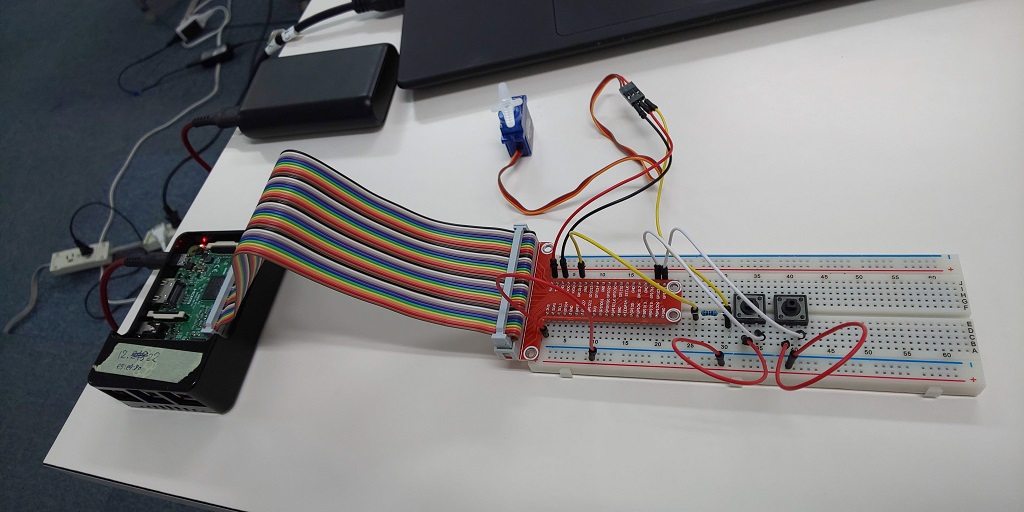
タクトスイッチの読み込んでPWMのヂューティーを変化させると、サーボモータの角度が変化するのを見てみよう
/*
* SG90 serbo moter test routine
*
* GPIO18=SERVO yellow cable
* TACK SWITCH=GPIO20,GPIO21
*/
#include <iostream>
#include <wiringPi.h>
#include <softPwm.h>
using namespace std;
int SERVO = 18;
/* 0-180 angle */
int set_angle(int angle) {
if (angle < 0) return 0;
if (angle >180) return 0;
double duty;
duty = angle / 9.8 + 5;
softPwmWrite(SERVO, int(duty));
return 1;
}
int main() {
int TACK1 = 20;
int TACK2 = 21;
int checkData = 0;
int inputData = 0;
int deg = 90;
int ret;
if(wiringPiSetupGpio()<0) {
cout << "wiring error\n";
return 1;
}
pinMode(SERVO, OUTPUT);
softPwmCreate(SERVO, deg, 100);
pinMode(TACK1, INPUT);
pinMode(TACK2, INPUT);
pullUpDnControl(TACK1,PUD_DOWN);
pullUpDnControl(TACK2,PUD_DOWN);
set_angle(deg);
while(true) {
inputData = digitalRead(TACK1);
delay(120);
if(inputData==1 ) {
deg+=10;
ret=set_angle(deg);
if (ret==0) deg -=10;
}
inputData = digitalRead(TACK2);
delay(120);
if(inputData==1 ) {
deg-=10;
ret=set_angle(deg);
if (ret==0) deg +=10;
}
}
return 0;
}
このサーボモータの角度の精度はそれほどでもないのです