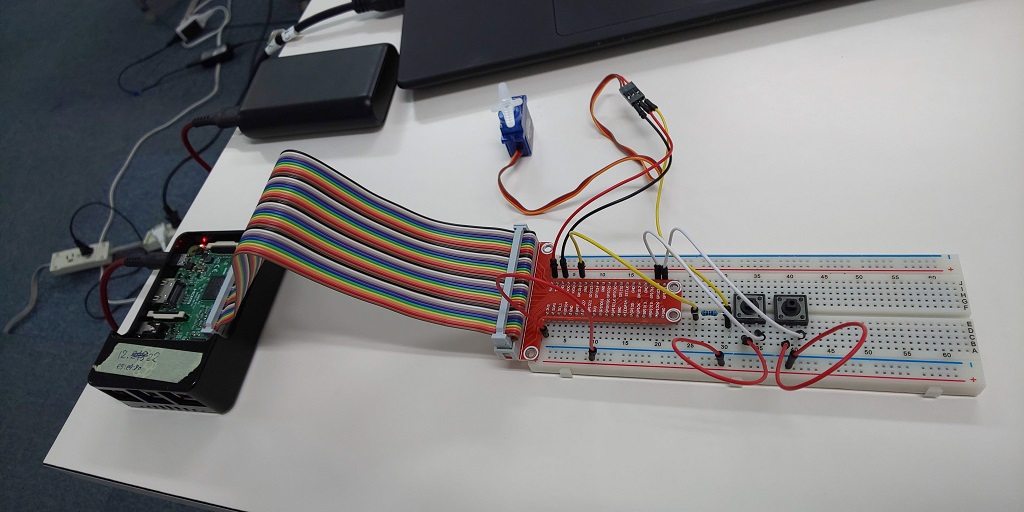
タクトスイッチでサーボモータをコントロールする
タクトスイッチの読み込んでPWMのヂューティーを変化させると、サーボモータの角度が変化するのを見てみよう
import RPi.GPIO as GPIO
from time import sleep
SV_PORT = 18
SW1_PORT = 20
SW2_PORT = 21
SV_FREQ = 50 # 20ms(50Hz)
SV_DUTY_OFFSET = 0.025
SV_DUTY_RES = (2.4 - 0.5) / 20 / 180
GPIO.setmode(GPIO.BCM)
GPIO.setup(SV_PORT, GPIO.OUT)
GPIO.setup([SW1_PORT, SW2_PORT], GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
servo = GPIO.PWM(SV_PORT, SV_FREQ)
servo.start(0)
sleep(0.3)
def set_angle(angle):
if angle < -90: angle = -90
if angle > 90: angle = 90
degree = (angle + 90)
duty = (SV_DUTY_OFFSET + SV_DUTY_RES * degree ) * 100
print("angle=", angle,"duty=", int(duty))
servo.ChangeFrequency(SV_FREQ)
servo.ChangeDutyCycle(duty)
#実際に角度を変えてみる
angle = 0
set_angle(angle)
while True:
try:
if GPIO.input(SW1_PORT) == GPIO.HIGH:
angle -= 10
set_angle(angle)
if GPIO.input(SW2_PORT) == GPIO.HIGH:
angle += 10
set_angle(angle)
sleep(0.1)
except KeyboardInterrupt:
break
GPIO.cleanup()
このサーボモータの角度の精度はそれほどでもないのです